

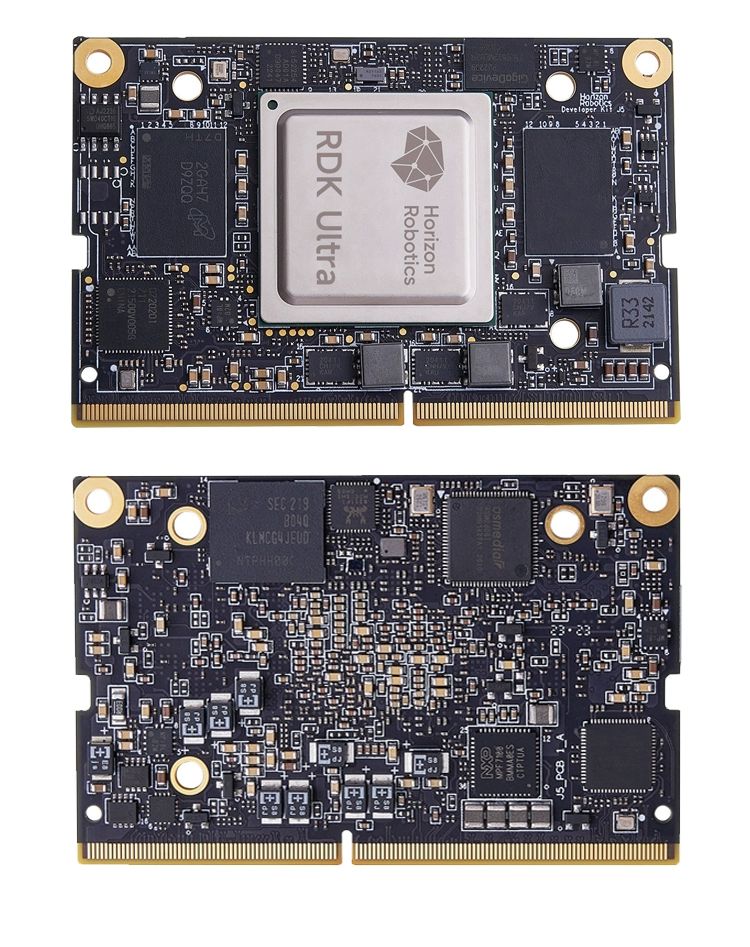
Horizon RDK Ultra Robot Development Kit Onboard MIPI Camera/USB3.0/PCIe2
Nchekwa efu na-echegbu onwe gị
Isi modul na-abịa na nchekwa 64G eMMC yana ọdụ ụgbọ mmiri PC abụọ ka edobere maka ịnweta nchekwa NVMe ndị ọzọ.
Nkwukọrịta na-enweghị mgbochi
Na mgbakwunye na ọdụ ụgbọ mmiri megabit akọrọ akọrọ, a na-etinyekwa ngwa ahụ modul kaadị ikuku ikuku abụọ, na-akwado Bluetooth 5.0, Wi-Fi dual-band, ebe ị na-agbakwunye antenna PCB, na-enye njikọ netwọkụ ikuku siri ike, ntụkwasị obi na ọrụ nkwukọrịta Bluetooth maka ngwa ahụ.
Ọgaranya interface
Ọdụ ụgbọ mmiri MIPICamera anọ, ọdụ ụgbọ mmiri USB3.0 anọ, yana ọdụ ụgbọ mmiri PCle2.0 abụọ.
Nhazi zuru oke
Ngwa ndị bụ isi dị ka ọkọnọ ike, ụlọ, Wi-Fi modul jụrụ oyi na igwefoto bụ ọkọlọtọ.
Ngwa tozuru oke
The Horizon robot sistem TogetheROSTM.Bot na-akwado bev. Ntinye ngwa ngwa nke algọridim robot na ngwa dị ka nghọta radar omimi binocular.
| Oke ngwaahịa | |
| AI ike kọmputa | 96 n'elu |
| CPU | 8 × A551.2G |
| Ebe nchekwa dị n'ime | 8GB LPDDR4 |
| Ụlọ ahịa | 64GB eMMC |
| Mgbasa ozi | H.265/HEVC Codec 4K@60fps. JPEG ngbanwe na ngbanwe 16Mpixels CBR, VBR, AVBR, FixQp na QpMap bitrate akara |
| Ihe mmetụta sensọ | 2×4-ụzọ MIPI CSI 2×2-ụzọ MIPI CSI |
| USB | 4 × USB3.0 |
| Debug serial ọdụ ụgbọ mmiri | 1 x Micro USB2.0, UART USB |
| Ngosipụta interface | 1 × HDMI1.4, nkwado 1080p@60 |
| Ikuku netwọk interface | Wi-Fi/Bluetooth modul abụọ (nhọrọ): Wi-Fi 2.4GHz/5GHz,Bluetooth 4.2 |
| Wired netwọk interface | 1 × RJ45 interface |
| Ndị ọzọ IO | 40PIN (UART,SPI,I2S,I2C,PWM,GPIO) 6 x akara aka ụkwụ 1 x PWM fan interface |
| Ntinye ike | 5~20V 10 ~ 25W |
| Nkwado sistemu | Ubuntu 20.04 |



Ụdị ngwaahịa
-

Wildfire LubanCat LubanCat 1 kaadị kaadị ịntanetị ...
-

WLE650V5-25 2 x 2 802.11ac Wave 2 M-PCIE waya...
-

Ụgbọ ala nchaji ikpo motherboard akara bọọdụ SMT ...
-

Ogwe njikwa ọkwa ụlọ ọrụ nwere ike ịhazi ya
-

Gopro3 Dog 3 ahịhịa na-enweghị PTZ Ahịhịa abụọ-ahịhịa na-enweghị ...
-

Mkpọchi ọnụ ụzọ ngwa efere mkpọchi akpaka
-

Ekwentị
-

E-mail
-

WhatsApp
-

Skype
-

Skype
-

Skype